EduSlop
Demo
Since 2011 I have been providing robotics and laboratory automation services to a range of clients, both academic and industrial. This set of work has provided me with a broad practical understanding of getting projects built under real world constraints of budget and time.
Below are a few projects that are typical of my work. Unfortunately due to privacy concerns we cannot display all our past projects here, though further details can be provided on request in some instances. Some projects have been conducted with partners, though the majority were independent.
Please click on the images for additional information regarding the projects.
Demo
An area of much great interest for me is designing strange 3D printers.
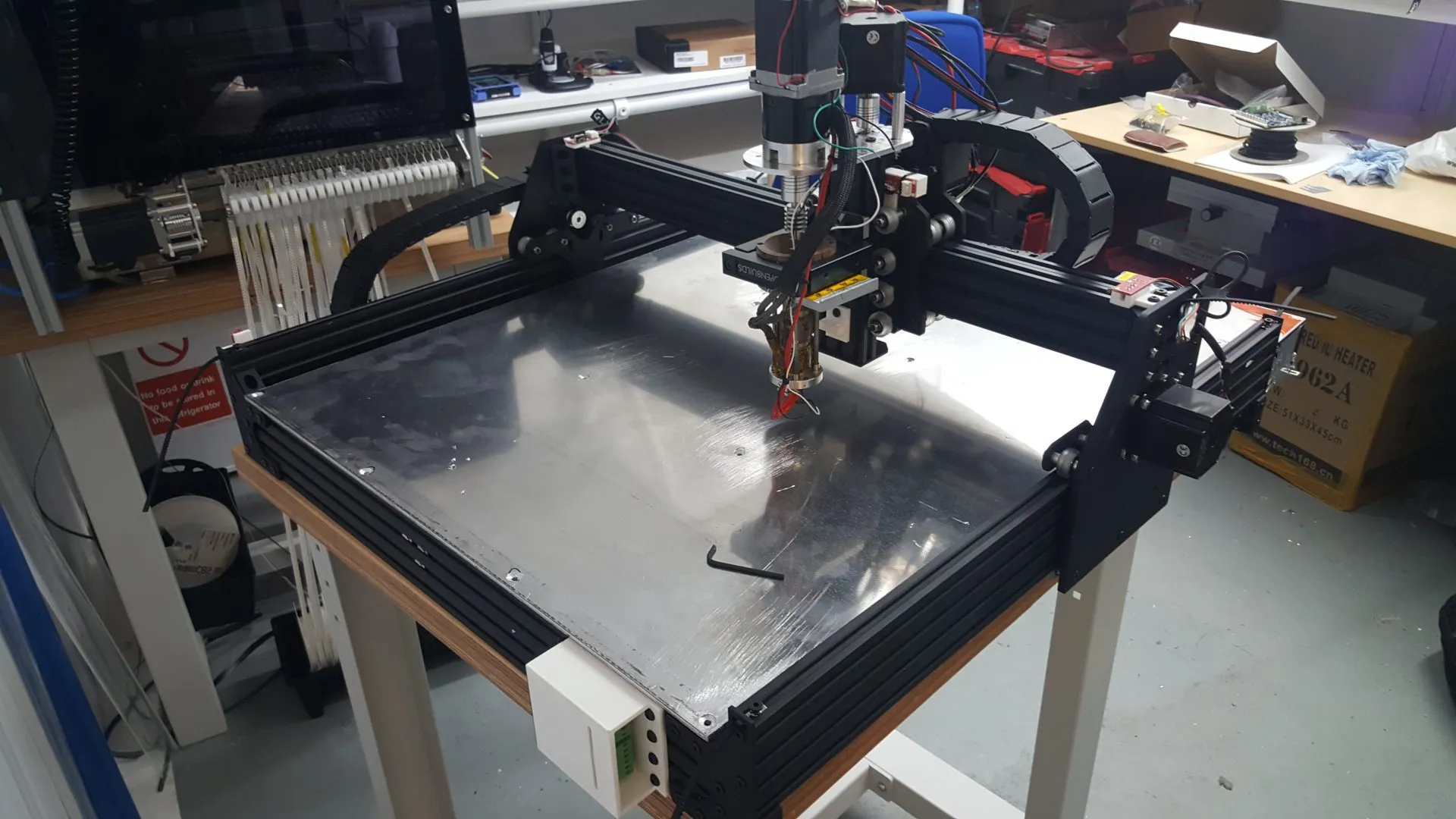
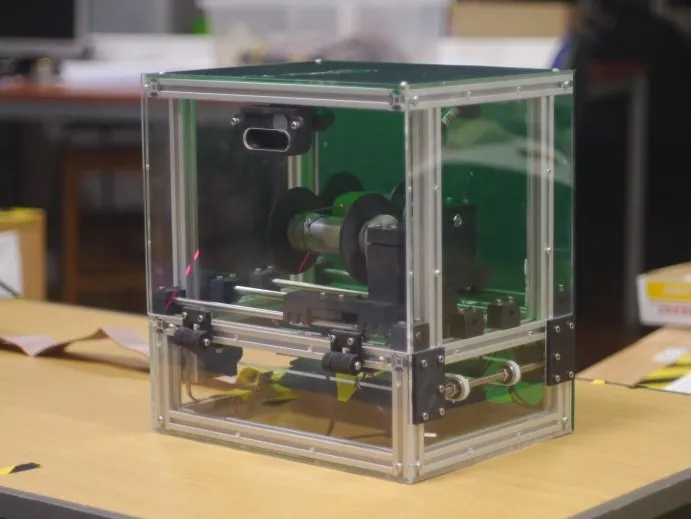
This is a 3D printer that prints directly from granules.
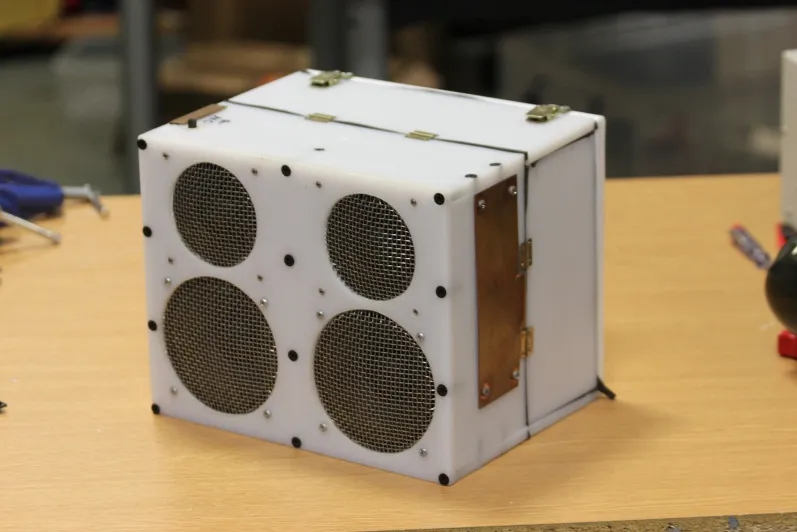
I have constructed many speakers over the years for different purposes.
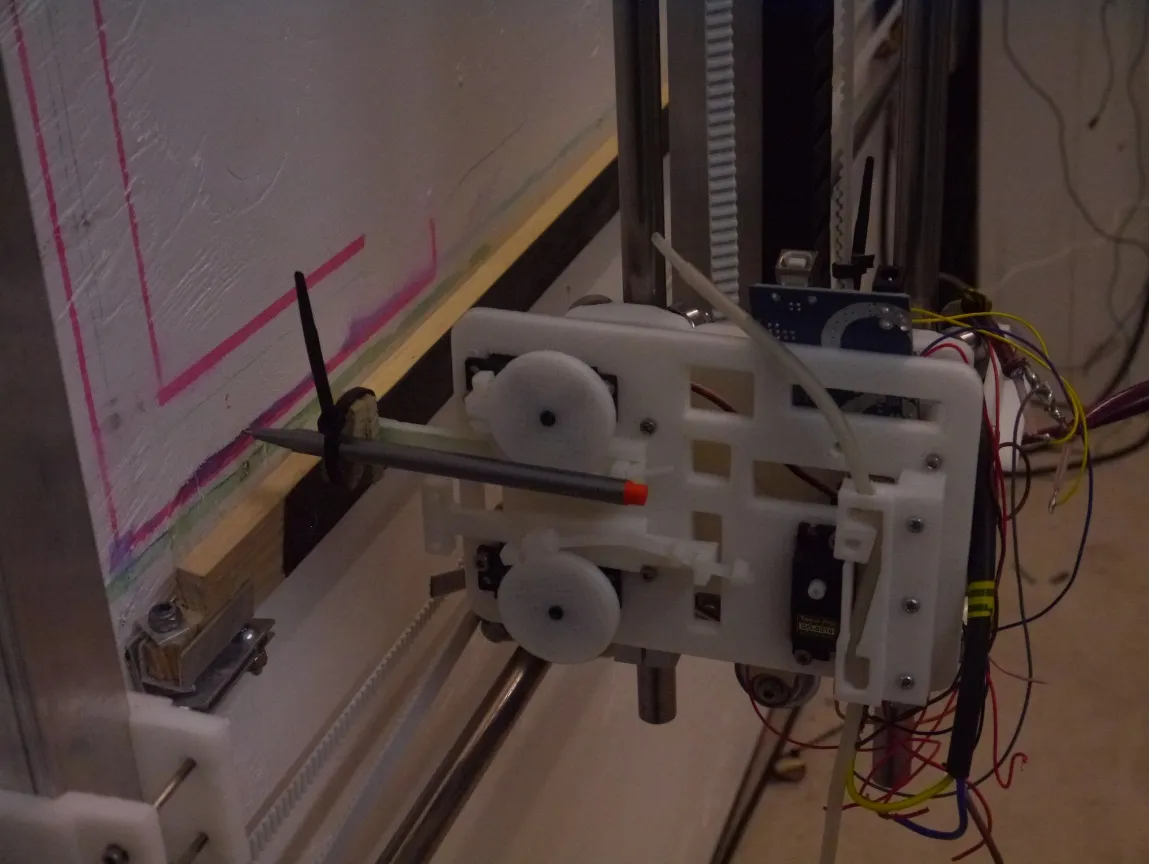
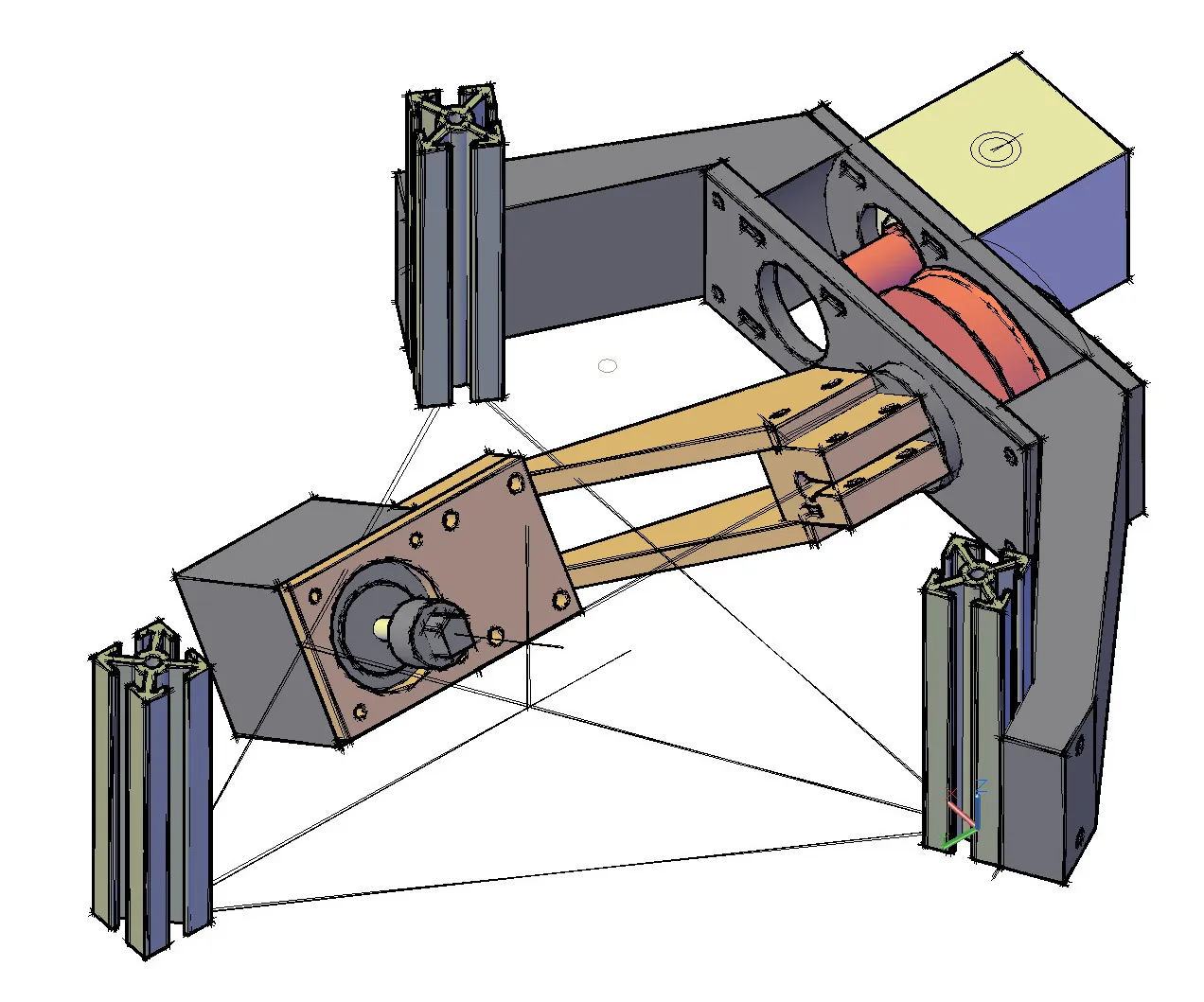
One of my earliest projects was to construct a XY gantry for an artist.
This is an extension of the micro robots project.
This was a project carried out as a contract for PaCE (Polymer and Composite Engineering) Lab at Imperial College London, in collaboration with Jack Ashley.

The clock ring is an exercise in low power electronics as well as designing under extreme space restrictions.
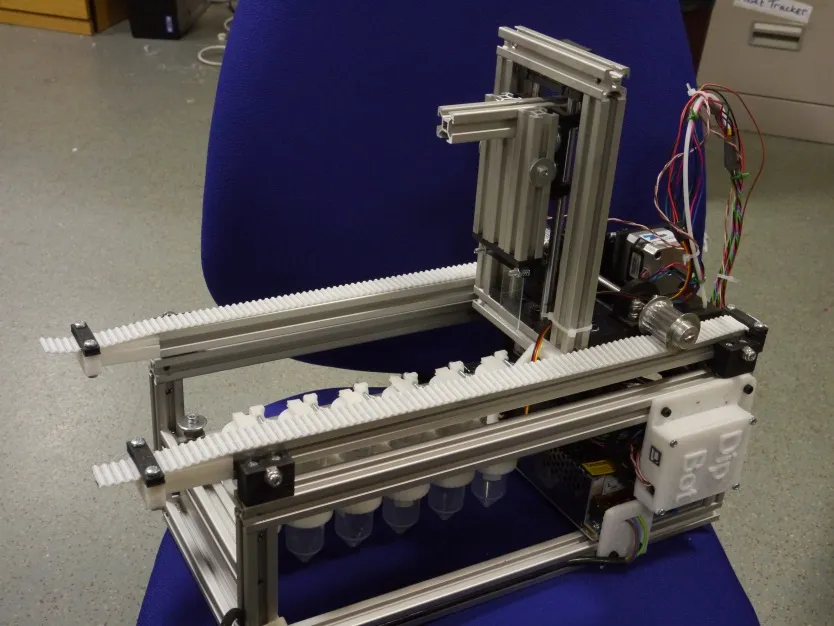
This was a project designed to automate a nano-chemistry experiment.
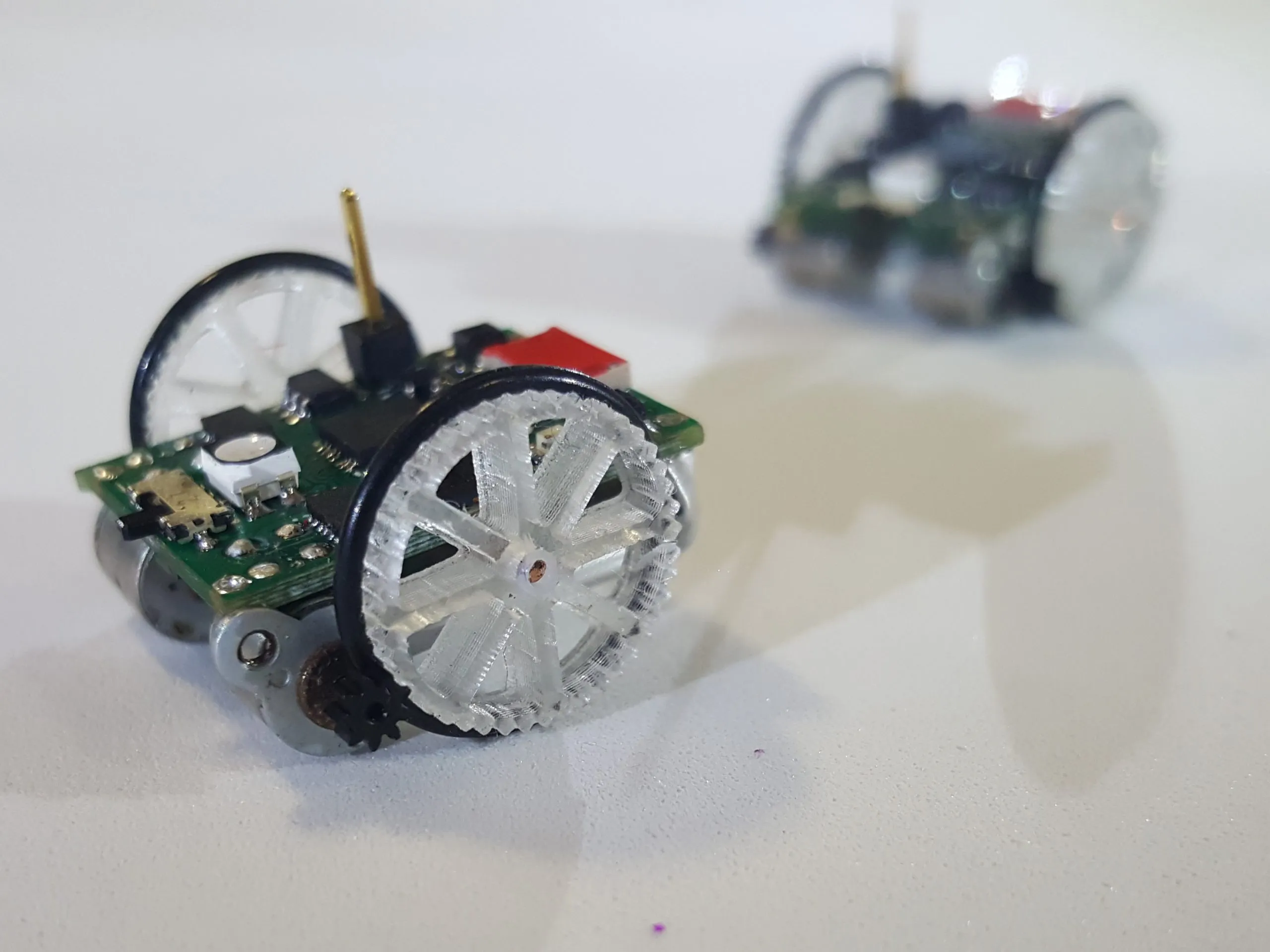
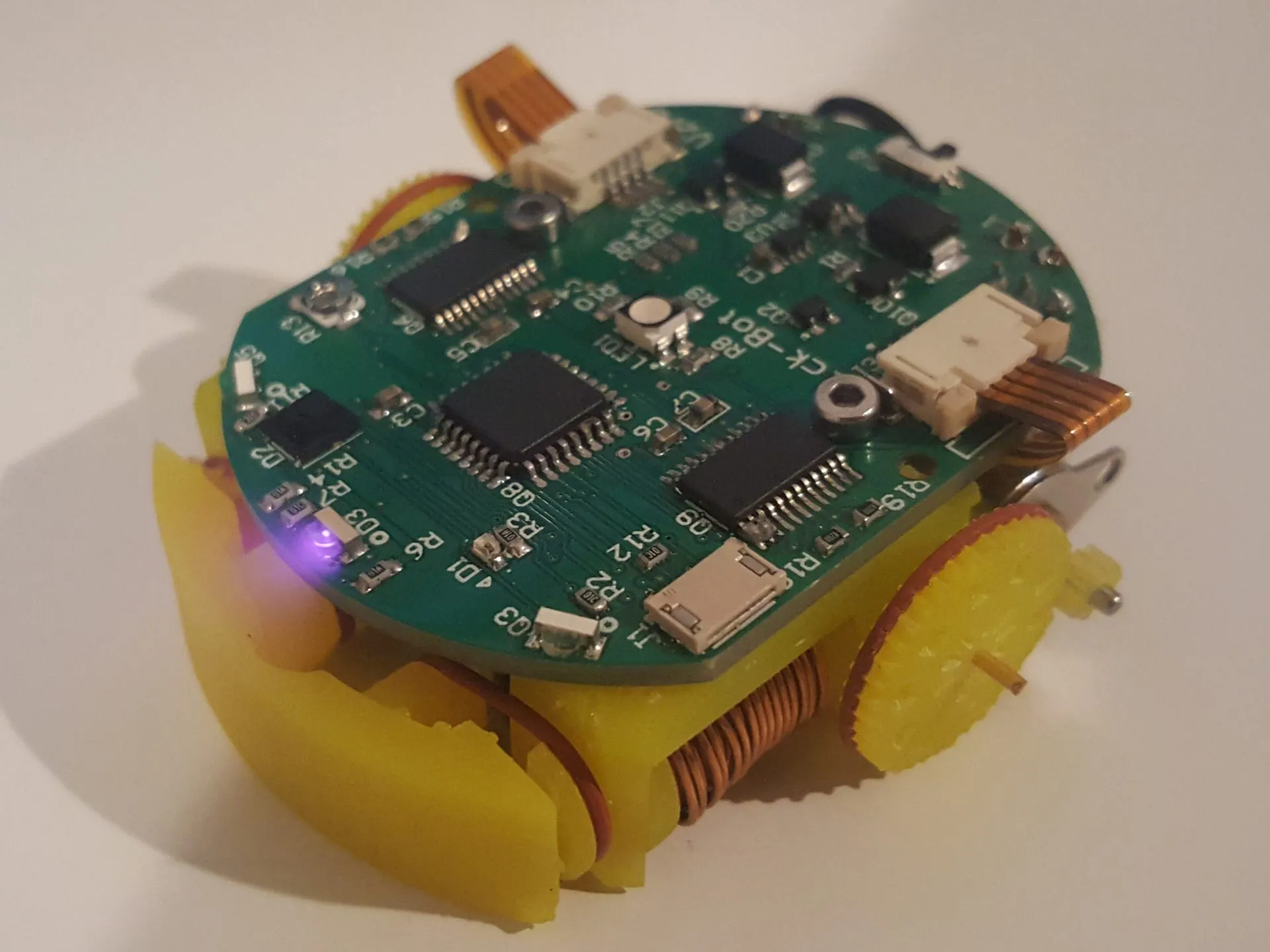
These small robots were designed to be a much smaller replacement for robots that are typically used to teach the ROS (Robotic Operating System).
@article{Unlisted2017,
author = {Thornett, Chris and Elsdon, Joshua},
journal = {Linux User & Developer},
month = {dec},
pages = {Issue 186:p72--73},
title = {{Micro robots}},
year = {2017}
}
A Unity WebGL build embedded directly in the page — it may take a moment to load.