
Augmented Reality
I have had extensive experience with the Microsoft Hololens, which I have used for visual feedback for my handheld robotic experiments.
I have had extensive experience with the Microsoft Hololens, which I have used for visual feedback for my handheld robotic experiments.
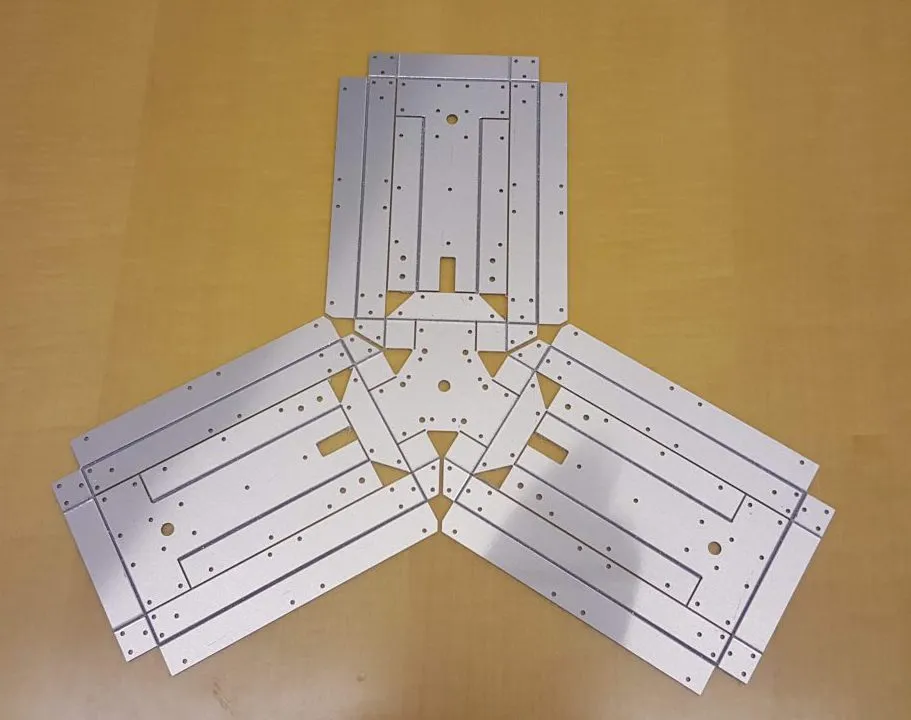
A delta robot is one that uses 3 motors to drive three sets of arms.
Due to the fact that a hand-held robot cannot complete a task without cooperation with the user, the pair naturally forms a shared control system.
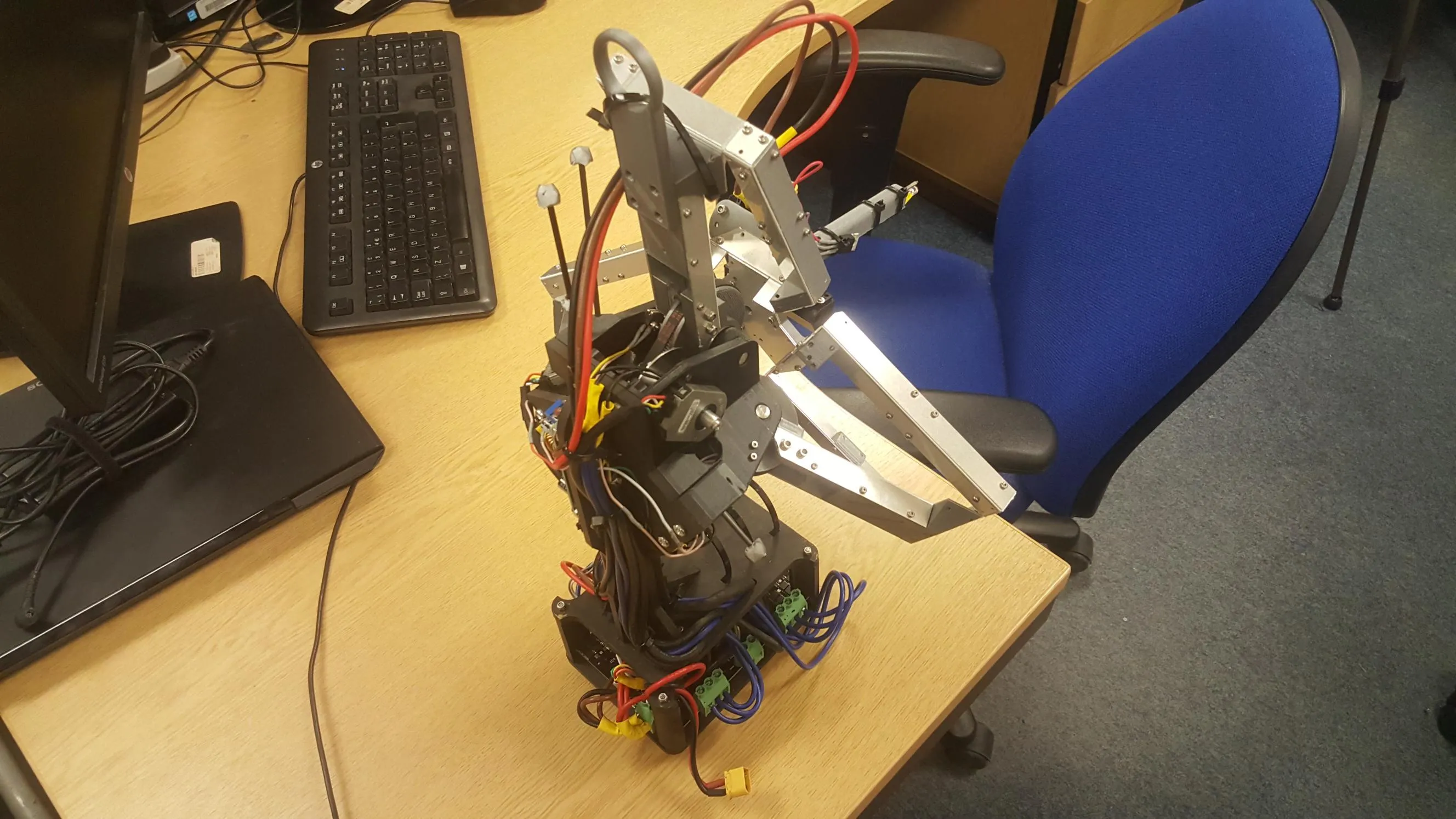
The primary platforms I have been using for my research have been hand-held robots.
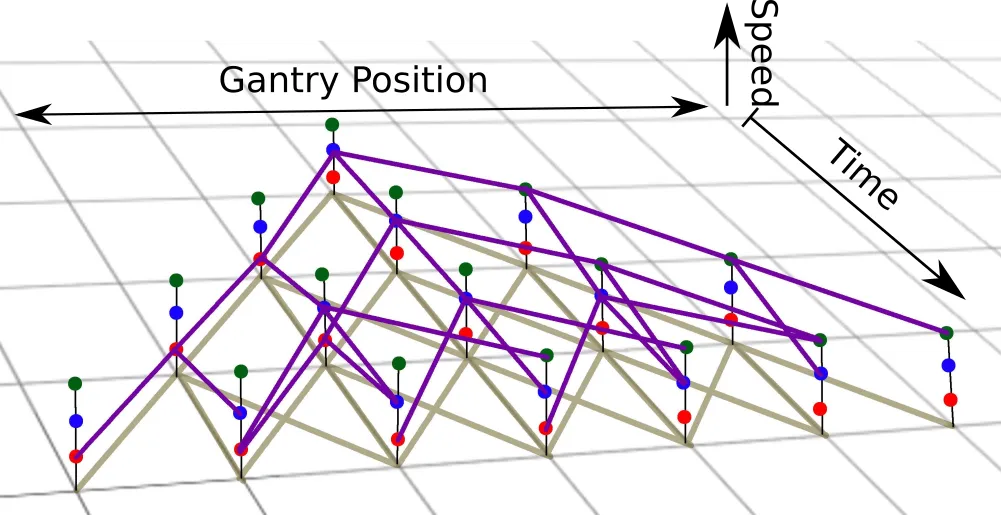
Due to the fact that the user is controlling the locomotion of the robot, and the robot can only provide local movements, path planning of the end effector must be done online.
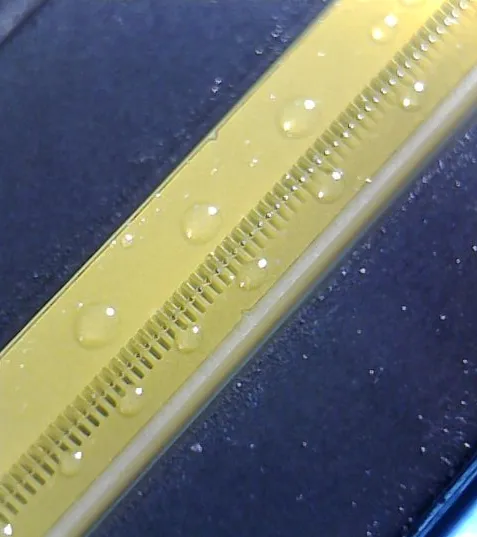
My project has primarily concerned tasks that require a user to spray a liquid onto a 3D surface.
@inproceedings{Elsdon2018,
author = {Elsdon, Joshua and Demiris, Yiannis},
booktitle = {2018 International Conference on Robotics and Automation (ICRA)},
pages = {1939--1946},
publisher = {IEEE},
title = {{Augmented Reality for Feedback in a Shared Control Spraying Task}},
year = {2018}
}
@inproceedings{Elsdon2018a,
author = {Elsdon, Joshua and Demiris, Yiannis},
booktitle = {2018 International Conference on Robotics and Automation (ICRA). Workshop: Robotics in Virtual Reality},
title = {{Augmented Reality Instructions for Shared Control of Hand-held Robotic Systems}},
year = {2018}
}
@inproceedings{Zolotas,
author = {Zolotas, Mark and Elsdon, Joshua and Demiris, Yiannis},
booktitle = {2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
publisher = {IEEE},
title = {{Head-Mounted Augmented Reality for Explainable Robotic Wheelchair Assistance}},
year = {2018}
}
@inproceedings{Elsdon2017,
author = {Elsdon, Joshua and Demiris, Yiannis},
booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
doi = {10.1109/ICRA.2017.7989566},
isbn = {978-1-5090-4633-1},
month = {may},
pages = {4891--4897},
publisher = {IEEE},
title = {{Assisted painting of 3D structures using shared control with a hand-held robot}},
url = {http://ieeexplore.ieee.org/document/7989566/},
year = {2017}
}
Pre-print versions of these works are available here.
My non-academic projects can be seen on the portfolio page.