Hand-held Robots
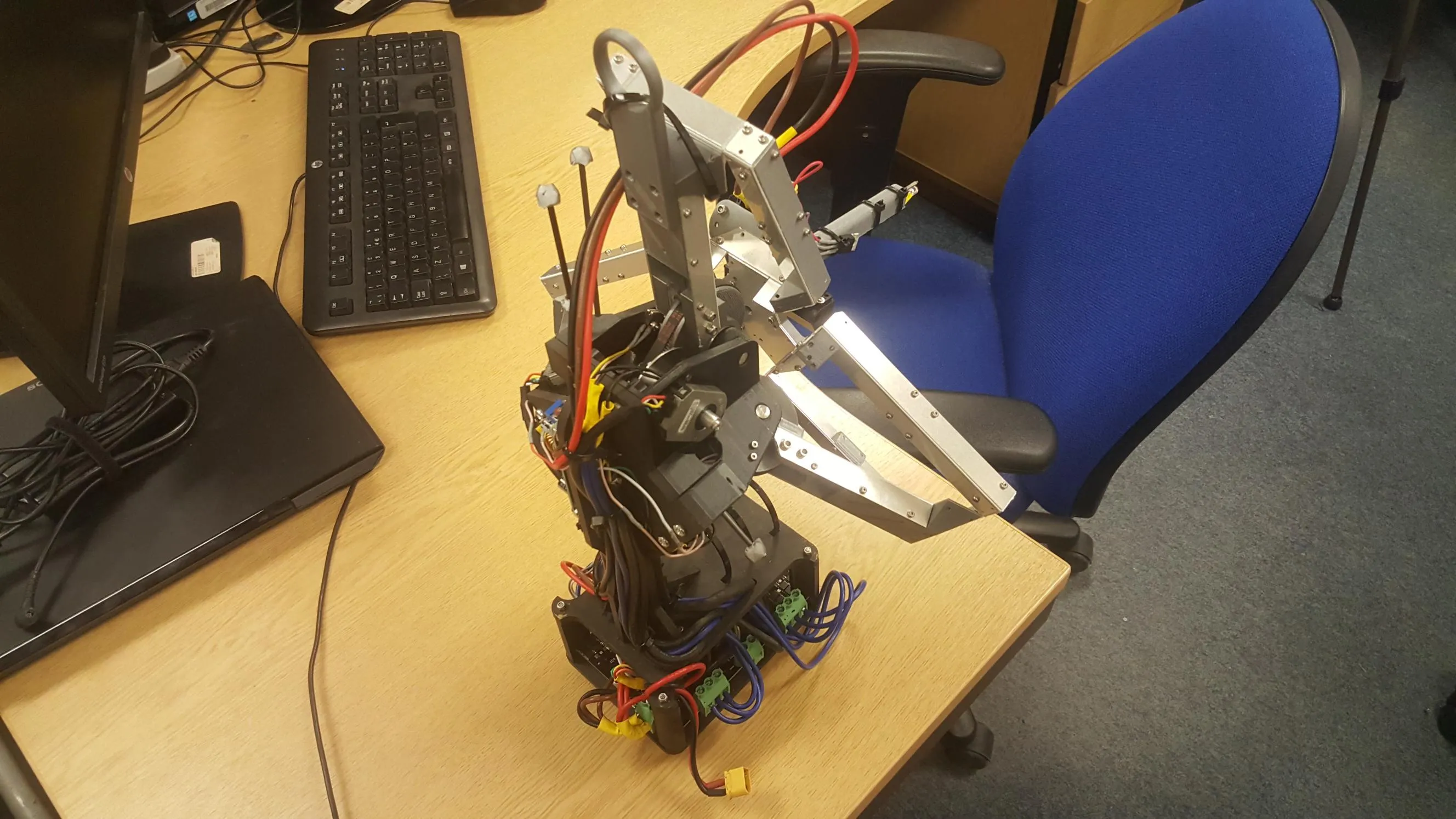
The primary platforms I have been using for my research have been hand-held robots.
The primary platforms I have been using for my research have been hand-held robots. A hand-held robot is one that has no method of locomotion, and is moved manually by the user and has no reliable link to the ground. The robot then provides some local movement, task specific knowledge and tracking of progress. To be successful this kind of robot must share control with the user. A further peculiarity of such a robot is that one must account for the lack of rigidity that the user’s arm provides, requiring real time estimation of the robots position.
Related publications
- Assisted Painting of 3D Structures Using Shared Control with a Hand-held Robot
PDF
BibTeX
@inproceedings{Elsdon2017, author = {Elsdon, Joshua and Demiris, Yiannis}, booktitle = {2017 IEEE International Conference on Robotics and Automation (ICRA)}, doi = {10.1109/ICRA.2017.7989566}, isbn = {978-1-5090-4633-1}, month = {may}, pages = {4891--4897}, publisher = {IEEE}, title = {{Assisted painting of 3D structures using shared control with a hand-held robot}}, url = {http://ieeexplore.ieee.org/document/7989566/}, year = {2017} }